油气联合站场虚拟巡检仿真系统
 2019-12-15 10:15:05
2019-12-15 10:15:05
 2165
来源: 智维创意科技
2165
来源: 智维创意科技
关键词:海底管道流动, 安全,虚拟仿真
项目简介
本项目采用虚拟仿真技术构建油气联合站场巡检场景,学生可依托本场景开展智能机器人和无人机进行虚拟巡检,完成实验教学及技能训练,提升教学效率和效果,优化学生的学习体验。 在虚拟环境中,学生可以对不同阀门和仪表进行操作,深化对已有理论知识的理解;可在虚拟场景开展自主设计巡检路径, 灵活的方式既能够激发学生养成主动掌握知识和不断反思的习惯,又能推动学生将理论知识应用于实践。在实验过程中,学生的学习能力不断得到提升。
项目内容与特色
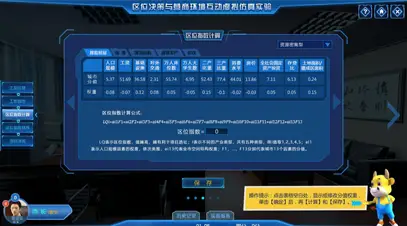
01 基本参数设置
基于不同载荷作用下海底管道的失效机理,模拟管道承受的复杂环境载荷,学生通过交互操作,掌握不同载荷作用下海底管道的结构完整性和失效行为分析防治方法。

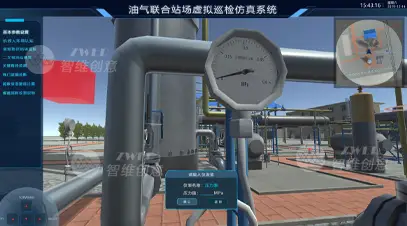
02 机器人环境认知
观察管内流体的温度、压力、速度以及水合物浓度分布等各项参数,以可视化形式展现管道中水合物从成核、结晶、生长到沉积、固结的全生命周期变化特征,掌握水合物生成机理及注醇抑制消除水合物操作流程。
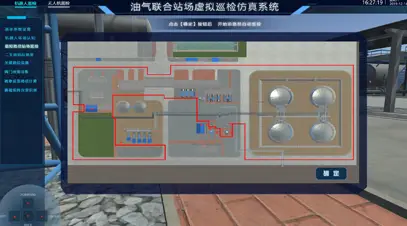
03 最短路径站场巡检
当屈曲压溃、涡激共振、水合物冻堵、严重段塞流等事故对海底管道造成严重破坏、常规预防手段失效时,必须进行应急维抢修。 通过让学生进入虚拟场景操作,掌握从施工船就位抛锚、挖沟作业、事故管段切割和替换、试压、回填等完整的海底管道维抢修作业流程以及其中的关键知识点。
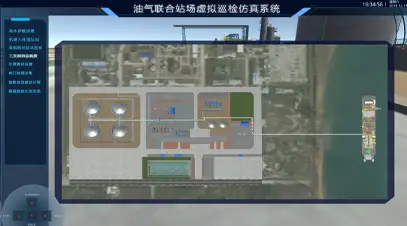
04 二叉树油品调度
通过清晰易懂的海底管道运行大数据采集-整理-传输-分析决策的业务链虚拟操作框架,形成交互式的智能化海底管道运行管理虚拟操作流程,让学生了解大数据驱动下的智能管道运行管理新概念并进行严重段塞流的预判与防控。